张发光,李 亭,范 聪,李国华
(1.北京理工大学前沿技术研究院,山东 济南 250300;2.山东国舜建设集团有限公司,山东 济南 250300)
引言在电力系统中,配电系统是生产、输送、分配三大系统的核心之一,配电系统对整个电力系统的安全可靠起着至关重要的作用[1]。而传统的巡检方式是巡检人员定期采集大量的运行数据,由于巡检人员素质、技术水平不同,会产生大量问题[2]。目前,电力机房、服务器机房智能巡检机器人已经开始应用到日常运维工作中,根据程序要求执行日常运维巡检任务,确保设备的安全运行,从而有效缩减值班人员[3]。
国内一些企业如国网智能等,都推出了适配与电力机房、服务器数据机房的轨道式巡检机器人、室内轮式地面巡检机器人。其中轨道式巡检机器人按预定轨道运行,机器人设计有多级伸缩杆,伸缩杆端部安装有检测装置[4],实现机柜的巡检作业。但机房内部上空布置有走线槽,造成巡检轨道多起起伏,使得巡检范围存在一定局限性[5]。室内轮式地面升降机器人,一般是地面移动平台搭载伸缩杆的组合方式,但伸缩杆本体高度较高,不能巡检高度较低的区域,同样存在局限性;沈阳自动化研究所设计的高压室巡检机器人,移动平台上搭载六自由度机械臂,巡检范围大,但控制很复杂,且成本很高,不利于大规模推广。
本文研制了一种适用于电力机房或服务器数据机房的室内轮式升降巡检机器人,该机器人采用扭簧式双叉臂减震底盘,滑轮式升降组件,搭载360°回转云台等末端执行器装置[6],可以实现较大高度范围内的巡检作业,并具有结构简单、控制简单、能耗低、成本低等优点,适合大规模推广利用[7]。
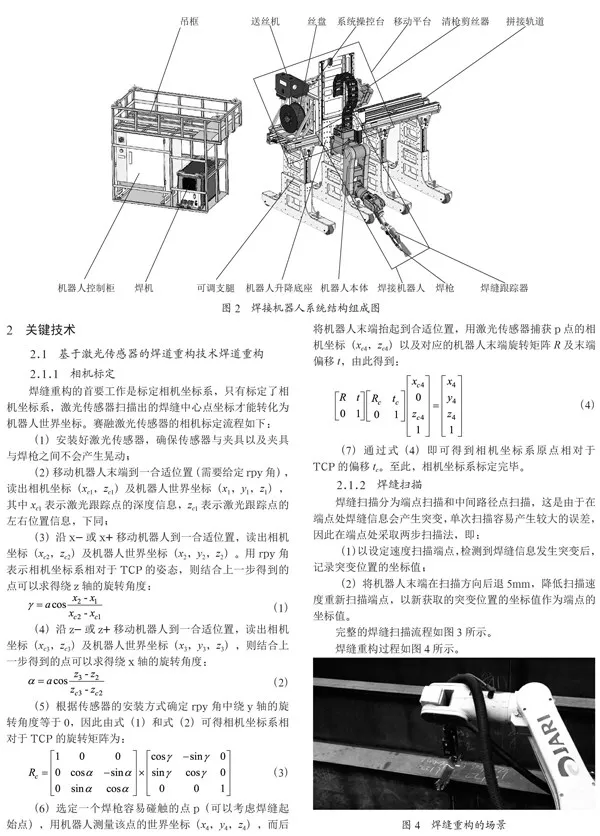
1 室内轮式升降巡检机器人总体构型室内轮式升降巡检机器人整体结构如图1 所示,主要有扭簧式双叉臂减震移动平台、升降组件、控制单元、末端执行器四部分组成。采用双叉臂的移动平台,可以实现对巡检机器人的减震,且通过扭簧式的双叉臂结构,能够简化常规的驱动轮减震结构,减小移动平台的生产制作成本。通过扭簧式双叉臂减震结构,可以增加底盘移动的机动性,在进行巡检的过程中,对于场地常见的线缆、线槽等障碍物可以实现跨越,且在一些电力机房地面的平整度较差时,具有较强的机动性实现爬坡的稳定,保证巡检作业的正常进行。升降组件实现对末端执行器的上下升降,采用同步带轮的形式,保证升降过程中末端执行器的稳定性,保证其巡检作业的准确性。末端执行器将巡检需要的多种传感器进行组合整体化安装,实现巡检检测传感器的模块化安装。控制单元对巡检机器人的整体运动及数据传输进行控制,实现所需的作业内容。
移动平台搭载有激光雷达、温湿度监测等传感器、整机控制系统单元等部件,可以实现移动平台的自主导航;环境内温度、气体等感知检测等。升降组件布置于移动平台上,托举末端执行器实现垂直方向内运动。末端执行器主要有云台、局部放电检测仪等装置,可对机柜上的指针、指示灯及是否带电等进行巡检及监测。
2 扭簧式双叉臂减震移动平台结构设计扭簧式双叉臂移动减震移动平台结构原理如下页图2 所示,底盘上设计有短连杆铰接座及长连杆铰接座,分别通过短连杆与长连杆与驱动轮连接;其中在长连杆铰接座上安装有扭簧,扭簧固定臂与底盘固定连接,施力臂则按压在长连杆上。扭簧具有一定的初始扭力,当越障或爬坡时导致扭转角发生变化时,可以保证驱动轮与地面始终处于紧密接触状态。
3 升降组件结构设计升降组件结构在设计过程中升降组件要满足末端执行器较大高度范围内的巡检要求,且本体高度不能太高。根据需求,设计了基于同步带驱动的两级倍速升降机构,其中云台等检测装置布置于云台安装座中。
该结构的工作原理为从动立柱与固定立柱之间通过直线导轨滑块进行连接,且从动立柱可以沿着固定立柱上下运动;从动立柱上端设计有同步带轮,提升同步带一端安装与固定立柱上,一端与云台安装座连接,云台安装座与从动立柱之间同样通过直线导轨滑块连接。当从动立柱上升时,提升同步带也会拉动云台安装座上升,从而实现云台等检测装置上下高度范围内的巡检工作。
4 室内轮式升降巡检机器人控制系统为实现巡检机器人对传感器信号采集、移动平台运动控制、升降组件运动控制,设计巡检机器人整体的控制架构如图3 所示。系统选用仙知SRC 系列控制器作为机器人主控制器,自研核心主板进行各个模块的交互与控制,从而实现巡检机器人的自主导航与任务巡检工作。
5 室内轮式升降巡检机器人工程样机验证依据所设计的结构及系统进行室内轮式升降巡检机器人工程样机的生产制作,对样机进行装配调试,并依据巡检过程中的工况进行相关的测试实验。从实验效果来看,机器人升降机构可以实现较大高度范围内的巡检工作,同时机器人自主导航、数据计算机回传等系统运行稳定,较好地实现了巡检功能。
6 结论针对电力机房、服务器数据机房较大高度范围内巡检的的特殊要求,设计了一种室内轮式升降巡检机器人。分析了机器人的工作需求,设计了基于扭簧减震的移动平台以及基于动—定滑轮组结构形式的升降组件,该机构减少了驱动电机的数量,大大简化了机器人的控制。最后研制了室内轮式升降巡检机器人样机,研制了升降机构及控制系统的合理性、稳定性。该机器人控制简单,成本低廉,在电力机房、服务器数据机房的巡检工作中具有较高的应用价值。