摘 要:为提高无人机的定位精度、缩减影像数据后处理时间,提出基于GPS/IMU紧耦合定位技术。应用POS辅助光束法平差技术和CUDA技术实现影像快速拼接。实验证明该方案能够大幅提高无人机巡查效率,在辅助城市巡查管理中取得了显著成效。
关键词:无人机航测;高精定位;变化检测;快速巡查;城市管理
中图分类号:P231.5 文献标识码:A 文章编号:2096-4706(2018)09-0001-04
Abstract:In order to improve the positioning precision of unmanned aerial vehicle and reduce the post processing time of image data,the high precision positioning of UAV based on GPS/IMU tight coupling positioning technology is proposed.POS assisted beam adjustment and CUDA technology are used to achieve rapid image mosaic. Experiments show that the scheme can greatly improve the efficiency of UAV patrol,and has achieved remarkable results in the auxiliary city patrol management.
Keywords:UAV aerial survey;high precision location;change detection;rapid inspection;urban management
0 引 言
随着无人机技术的日趋成熟,基于无人机平台的数据采集处理技术和灵活机动的应用方案已显示出越来越强的优势[1]。例如传统的国土巡查以人工监察为主,必须赶到现场,如果对方抗拒检查,则无法近距离调查,给查证工作造成了很大的困难[2]。运用无人机进行空中巡查,可以快速实现预定区域的地物观测,让违章建筑无处遁形。与人工结合形成立体式防空网,实现监管全覆盖,节省大量的人力物力,提高管理效率[3]。
但是受无人机系统局限性的影响,无人机的高效灵活优势往往很难发挥。首先,由于无人机定位模块精度较低、抗干扰性差,常出现10~20米的地面偏差,难以低空精准观测问题区域。为保证覆盖度,需要测区需要外扩50米左右,降低的作业效率,同时也提高了飞行成本;其次,无人机的影像数据处理沿用了传统的摄影测量技术,虽然保障了数据的精度,但需要无人机达到70%以上的叠片率,且后台数据拼接处理低效,耗费时间过长[4-6]。实践发现,无人机外业和内业的耗时比例达到了1:5,无法真正体现无人机的快速巡查能力。
本文集无人机高精度定位系统、影像快速拼接技术和交互式变化检测平台于一体,建立无人机快速视觉巡查系统,系统化地提高无人机视觉快速巡查能力。首先,集成了相机和高精度定位定姿系统的无人机视觉快速巡查系统,由相机获取影像信息,GPS和IMU获得地理位置和姿态信息,通过高精度定位模组和算法进行时间同步和坐标转换,影像中的每个点都可以获取到在大地坐标系的地理位置。其次,使用影像快速拼接技术,可进一步提高影像精度,满足快速巡查的需要。
1 无人机定位定姿系统(POS)
当前,无人机的快速巡查主要指根据规划航线进行的多期巡飞任务。由于系统定位精度低,一般需要进行航线外扩或增加航线间的叠片率,导致飞行和数据处理效率低等问题。
引入无人机高精度定位系统能减少冗余航线的拍摄,有效降低航线间的叠片率。系统主要包括高精度定位模块和无人机系统集成两个关键部分。
1.1 高精度定位模块
高精度定位模块使用GPS+北斗系统的多频信号接收和多频解算,消除多种观测误差。同时采用GNSS/IMU紧耦合技术,提高定位精度。
1.1.1 北斗定位系统
GNSS接收机支持GPS+北斗系统的多频信号接收。多频观测信息极大地改善了卫星导航系统观测的冗余度,有助于载波相位整周模糊度快速、准确地固定。
1.1.2 多频解算
采用合理的处理策略对多频数据进行整体解算,可消除多种观测误差,提高定位精度及可靠性。双频接收机可以估计并消除电离层延迟误差,是保护接收机不受干扰的基础且最有效的手段。另外,新信号的设计也能够提升多径效应抑制能力。
1.1.3 IMU紧耦合
紧耦合是双向信息传输的,它通过GNSS卫星导航技术和INS惯性导航技术实现相互补充,这既能保证在小于4颗卫星信号时,利用INS数据持续地得到高精度的位置、速度和姿态信息,也能保证在INS系统误差变大的情况下,利用GNSS数据对INS系统进行修正,以持续输出高精度的位置和姿态信息。
1.2 无人机系统集成
1.2.1 时间同步
融合影像数据和IMU数据之前,必须要进行数据的时间同步校准,否则会存在较大误差。时间同步校准使拍照时间和IMU记录点时间基本一致,数据一一对应,是后续数据处理的基础。
时间同步步骤如下:
(1)设置拍照触发,拍照时输出脉冲信号;
(2)IMU捕捉脉冲信号并同步记录数据;
(3)评估触发拍照和IMU记录数据的时间延时误差,并作为影像拼接容差的时间残差参数。
1.2.2 空间同步
相机和IMU有各自独立的坐标系,在数据处理和评定前需要将其统一到一个通用的绝对坐标系下。空间同步步骤如下:
(1)标定相机和IMU:针对相机和IMU平台的三轴关系进行相机和IMU的标定,求得两者之间的旋转矩阵和平移矩阵;
(2)评估标定的误差和精度,并作为影像拼接容差的空间残差参数。
2 无人机影像快速拼接技术
2.1 基于POS的影像快速纠正
针对无人机受风力影响导致影像旋角大、影像变形严重的问题,本文提出一种基于POS的影像快速匹配方法。首先计算影像坐标系和导航坐标系的变换关系,然后利用无人机获取的POS姿态角,恢复影像拍摄时的真实姿态,并根据摄像机成像原理与数学几何关系计算原始影像的纠正模型,最后利用间接法对原始影像重采样,将原始影像快速纠正为近似正摄影像,保证拼接影像的质量。
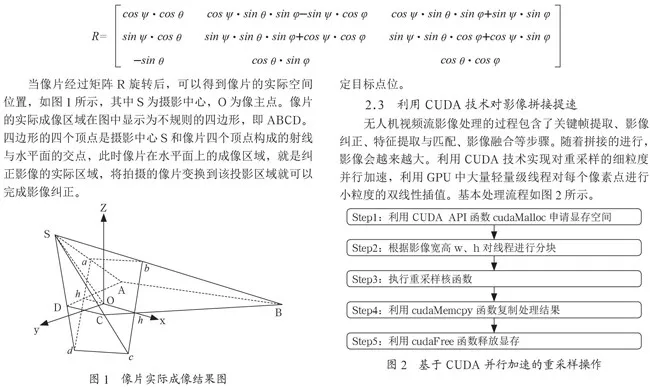
定位模块获取的空间位置(X、Y、Z)以及惯导系统获取的航片空间姿态,即俯仰角ψ、侧滚角ω和航偏角φ,可认为是水平像片分别绕像片的x、y、z轴旋转得到。此时,POS的姿态角构成的旋转矩阵可用下式表示[7]:
当像片经过矩阵R旋转后,可以得到像片的实际空间位置,如图1所示,其中S为摄影中心,O为像主点。像片的实际成像区域在图中显示为不规则的四边形,即ABCD。四边形的四个顶点是摄影中心S和像片四个顶点构成的射线与水平面的交点,此时像片在水平面上的成像区域,就是纠正影像的实际区域,将拍摄的像片变换到该投影区域就可以完成影像纠正。
2.2 POS辅助光束法区域网平差
在影像纠正的基础上,进一步使用POS辅助光束区域网平差法[8,9],利用高精度载波相位差分技术,将获取相机曝光瞬间投影中心的三维坐标和姿态视为附加观测值纳入区域网进行联合平差,经采用统一的数学模型和算法,整体确定目标点位。
2.3 利用CUDA技术对影像拼接提速
无人机视频流影像处理的过程包含了关键帧提取、影像纠正、特征提取与匹配、影像融合等步骤。随着拼接的进行,影像会越来越大。利用CUDA技术实现对重采样的细粒度并行加速,利用GPU中大量轻量级线程对每个像素点进行小粒度的双线性插值。基本处理流程如图2所示。
3 无人机快速巡查系统的实现
3.1 无人机快速巡查系统开发
基于无人机影像快速拼接技术,本文开发了无人机快速巡查系统,可对比相同位置下影像的地物类型、光谱特征等信息,利用差分工具,找出可疑点,缩小比对范围,再采用
其中,双屏比对系统用来对比两期影像,发现问题变化点,并根据已有问题确定需要比对的两期照片,双屏显示这两期照片,根据问题点位置人工判断是否有变化,如有变化,可在相应位置做出标记。
3.2 实验方案设计
本方法在常州市城市管理快速巡查中进行实践验证,以固定翼无人机作为远距离全域巡检平台、以旋翼无人机作为中近距离精细巡检平台。首先采用固定翼无人机,进行快速、大范围巡查筛选;如发现异常点或异常区域,再利用旋翼无人机在该区域进行更高频次的精细巡检。这种巡检作业模式,能有效提升变化检测效率,减少作业人员的劳动强度,降低成本。其中固定翼飞行高度约500米,影像分辨率约0.08米,旋翼无人机飞行高度350-450米,影像分辨率约0.05米。
通过搭载高精度POS系统,实现规划航线上的定点拍摄,使不同时期、相同区域的影像,空中拍摄位置一致。相比传统航空摄影在航向和旁向重叠度上有更严格的技术要求。本文的无人机影像快速巡查方法主要以保证航向和旁向重叠不出现航拍漏洞为主,设计影像航向和旁向叠片率为10%~30%。
3.3 实验结果
3.3.1 基于POS的影像拼接结果
对全域无人机影像需进行拼接,以便获取项目区域的整体情况,快速拼接结果如图4所示。
虽然基于坐标信息的影像拼接仍存在一定的位移和形变偏差,但可以获取重要的地理坐标信息,在应急事件时就显得十分重要-可以快速的进行空间定位,为决策者提供有力的、全面的信息。进而使用CUDA加速,基于POS辅助光束法区域平差法优化影像精度,处理效果如图5所示。
3.3.2 影像快速比对结果
影像比对包括旋翼无人机单幅影像与固定翼无人机拼接影像的比对,以及旋翼无人机不同时期之间单幅影像的比对。将影像加载到自主研发的双屏比对工具中,通过拖动放大一侧屏幕实现两期影像相同位置的快速匹配,并显示在比对窗口,标记出变化点。结合导航电子地图,城市管理人员能快速定位到问题点,进行实地核查,提高巡查效率。
清理违章建筑是城市管理的重要工作,如小区楼顶违建、农田占用违建、未交付道路偷倒垃圾等。通过对比航拍影像可以及时发现新出现的违章建筑,从图6可以很清晰分辨出违章建筑。使用本文方法,平均每天可快速检测20~30km2的范围,大大提高了无人机的巡查效率。
4 结 论
本文利用无人机系统集成技术,建立无人机上集成高精度定位系统;运用IMU紧耦合技术,采集位置和姿态信息,并进行多频解算以得到空间位置信息;利用POS数据进行影像快速纠正;采用POS辅助光束法进行区域网平差,确定目标点位;引入CUDA技术对纠正影像进行拼接。本文研究表明:
(1)在高精定位系统的基础上,采用紧耦合和多频解算方法,即使在信号微弱、地形复杂的区域,也能获得高精度定位数据。
(2)采用POS辅助光束区域网平差,由于将投影中心的三维坐标和姿态视为附加观测值纳入区域网进行联合平差,能有效较少控制点,提高工作效率。
(3)运用CUDA技术进行影像拼接,有效提升了影像的拼接速度。
本文提出的无人机视觉快速巡查系统具有很强的实用性,能够应用于城市的管理监测。通过影像可以清晰地查看城市违建情况,进行更精准的执法。未来将继续致力于无人机高精度定位的实时化研究,包括实时获取无人机的位置和姿态,以确保无人机安全,并将拍摄结果实时回传至后台,以进一步提高无人机的巡查效率,满足更高的应急检查需要。
参考文献:
[1] 鲁恒,李永树,何敬,等.无人机低空遥感影像数据的获取与处理 [J].测绘工程,2011,20(1):51-54.
[2] 李玉梅.无人机航空摄影在农村土地承包确权工作中的应用 [J].价值工程,2015,34(6):233-234.
[3] 王洛飞.无人机低空摄影测量在城市测绘保障中的应用前景 [J].测绘与空间地理信息,2014,37(2):217-219+222.
[4] 张剑清,潘励,王树根.摄影测量学 [M].武汉:武汉大学出版社,2003.
[5] 吴云东,张强,王慧,等.无人直升机低空数字摄影与影像测量技术 [J].测绘科学技术学报,2007,24(5):328-331.
[6] 程超,段连飞,李金,等.无人机航空像片绝对定向非迭代解算方法研究 [J].海洋测绘,2008(5):49-52.
[7] 王光辉,武斌敬,龙敬琪,等.低空无人机视频影像可量测立体模型构建技术 [J].海洋测绘,2016,36(1):75-78.
[8] 袁修孝.POS辅助光束法区域网平差 [J].测绘学报,2008,37(3):342-348.
[9] 郭忠磊,赵志勇,滕惠忠,等.无人机影像自检校光束法区域网平差精度分析 [J].海洋测绘,2016,36(2):75-78.
[10] 洪宇,龚建华,胡社荣,等.无人机遥感影像获取及后续处理探讨 [J].遥感技术与应用,2008(4):462-466+361.
[11] 熊自明,葛文.基于GIS的无人机地面监控系统的设计与实现 [J].海洋测绘,2007(4):54-56+80.
[12] 熊自明,牛红光,孟庆志,等.无人机航空照片辅助判读系统的设计与实现 [J].海洋测绘,2009,29(5):37-39.
作者简介:柳宗伟(1973-),男,汉族,湖北潜江人,高级工程师,博士。研究方向:智能交通、智慧城市;栾学晨(1985-),男,汉族,山东青岛人,工程师,博士。研究方向:无人机三维建模、高精地图技术。