摘 要:现针对家庭用户设计了一种自动清洁外窗系统,该系统采用STM32F103C8T6微控制器对雨刮进行智能化控制。雨滴传感器监测下雨量从而启动舵机转动,使得雨刮自动清洁外窗。本文详细介绍了该系统的工作原理、机械结构的设计方法以及控制系统的设计。自动清洁外窗系统采用FreeROTS实时操作系统实现了软件定时器任务和舵机控制任务,通过搭建窗户功能模型,验证了本设计的可行性。
关键词:雨刮;微控制器;智能化控制;清洁外窗
中图分类号:TP212 文献标识码:A 文章编号:2096-4706(2018)09-0173-04
Abstract:A self-cleaning outside window system is designed for family users. The system uses the STM32F103C8T6 microcontroller to intelligently control the wiper. The raindrop sensor monitors the amount of rain to start the steering gear rotation so that the wiper automatically cleans the outside window. This paper introduces the working principle of the system,the design method of the mechanical structure and the design of the control system in detail. The automatic window cleaning system uses FreeROTS real-time operating system to implement software timer tasks and servo control tasks. The feasibility of this design was verified by the built-in window function model.
Keywords:wiper;microcontroller;intelligently control;clean outside window
0 引 言
当下,人口基数越来越大,经济高速增长,越来越多的人涌入大城市谋发展,部分城市的居住密度越来越大,城市住宅建筑开始向高处发展,特别是一线城市,住宅建筑越建越高。为了使密集的住宅有良好的采光效果,框架式的高层住宅常采用大面积的玻璃窗面。市场上的窗户产品大部分仅仅是解决了简单的开、关和通风换气功能,而很少考虑手动清洁外窗任务繁重且危险。现急需设计一种简单易行的外窗清洁系统。现有的玻璃清洁机器人结构庞大、价格昂贵、用水量大,清洁后污水处理也是个难以解决的问题[1]。因此,不太适合家居日常使用。研发一种低成本的智能家居清洁外窗系统可免去手动清洁外窗的麻烦,有着极强的实用性。智能家居清洁外窗系统的使用将大大降低高层外窗的清洗成本,改善家庭的生活环境,对当今社会和经济有一定作用,且有一定的应用前景。
1 控制系统的硬件设计
1.1 雨刮器的机械结构
下雨天可以通过控制雨刮片在窗户玻璃上的运动,将雨水扫去并自然地对窗体起到了清洁的作用。若在无雨水的情况下,可以以人工触发的方式控制雨刮器。雨刮器的设计非常简单,通过舵机的带动使雨刮片产生圆弧运动,从而实现清洁外窗的功能,如图1所示。
1.2 窗户的整体结构
雨刮器在舵机的作用下产生圆弧运动,从而进行清洁工作。窗户的形状至关重要,如果窗户是圆形的,雨刮器可以360°运作;但是窗户普遍是正方形的,现采用两个舵机分别控制两个雨刮器以实现对整个窗户清洁的目的,如图2所示。
两个雨刮器分时协作,它们运动产生的弧形会相互重叠,由于窗是正方形,这样就实现窗户区域的全覆盖了。
1.3 嵌入式STM32硬件系统
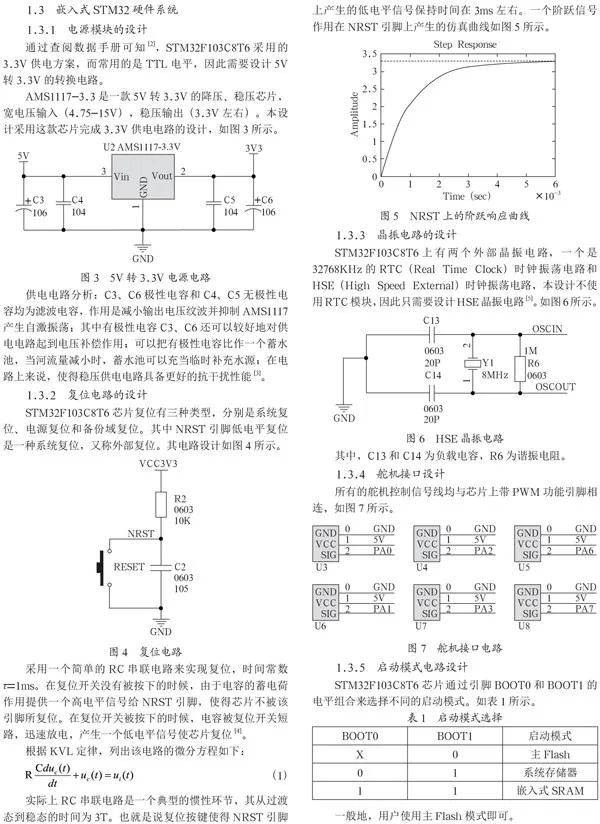
1.3.1 电源模块的设计
通过查阅数据手册可知[2],STM32F103C8T6采用的3.3V供电方案,而常用的是TTL电平,因此需要设计5V转3.3V的转换电路。
AMS1117-3.3是一款5V转3.3V的降压、稳压芯片,宽电压输入(4.75-15V),稳压输出(3.3V左右)。本设计采用这款芯片完成3.3V供电电路的设计,如图3所示。
供电电路分析:C3、C6极性电容和C4、C5无极性电容均为滤波电容,作用是减小输出电压纹波并抑制AMS1117产生自激振荡;其中有极性电容C3、C6还可以较好地对供电电路起到电压补偿作用;可以把有极性电容比作一个蓄水池,当河流量减小时,蓄水池可以充当临时补充水源;在电路上来说,使得稳压供电电路具备更好的抗干扰性能[3]。
1.3.2 复位电路的设计
STM32F103C8T6芯片复位有三种类型,分别是系统复位、电源复位和备份域复位。其中NRST引脚低电平复位是一种系统复位,又称外部复位。其电路设计如图4所示。
采用一个简单的RC串联电路来实现复位,时间常数τ=1ms。在复位开关没有被按下的时候,由于电容的蓄电荷作用提供一个高电平信号给NRST引脚,使得芯片不被该引脚所复位。在复位开关被按下的时候,电容被复位开关短路,迅速放电,产生一个低电平信号使芯片复位[4]。
实际上RC串联电路是一个典型的惯性环节,其从过渡态到稳态的时间为3T。也就是说复位按键使得NRST引脚上产生的低电平信号保持时间在3ms左右。一个阶跃信号作用在NRST引脚上产生的仿真曲线如图5所示。
1.3.3 晶振电路的设计
STM32F103C8T6上有两个外部晶振电路,一个是32768KHz的RTC(Real Time Clock)时钟振荡电路和HSE(High Speed External)时钟振荡电路,本设计不使用RTC模块,因此只需要设计HSE晶振电路[5]。如图6所示。
其中,C13和C14为负载电容,R6为谐振电阻。
1.3.4 舵机接口设计
所有的舵机控制信号线均与芯片上带PWM功能引脚相连,如图7所示。
1.3.5 启动模式电路设计
STM32F103C8T6芯片通过引脚BOOT0和BOOT1的电平组合来选择不同的启动模式。如表1所示。
一般地,用户使用主Flash模式即可。
启动模式电路设计如图8所示。
1.3.6 雨滴模块接口设计
芯片通过A/D接口采集雨滴模块的信号,因此雨滴模块的A/D接口要和芯片上具备A/D功能的引脚相连,如图9所示。
1.4 硬件系统的整体框图
2 控制系统的软件设计
2.1 嵌入式实时操作系统的移植
FreeRTOS在ARM平台上的移植非常简单,Free RTOS团队已经为多种平台、内核架构提供移植支持,它在FreeRTOS源码包中的portable文件夹。将相应的文件添加到工程中,然后修改stm32的启动代码即可[6]。
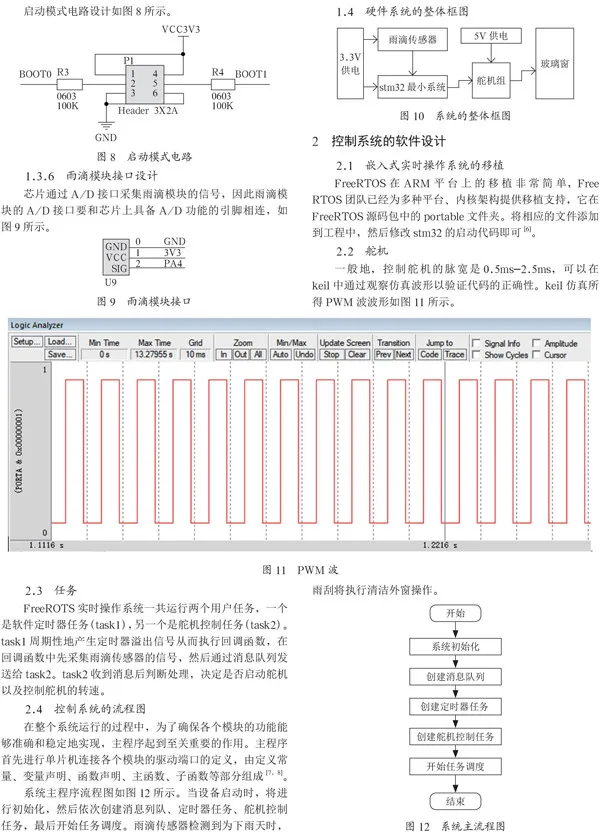
2.2 舵机
一般地,控制舵机的脉宽是0.5ms-2.5ms,可以在keil中通过观察仿真波形以验证代码的正确性。keil仿真所得PWM波波形如图11所示。
2.3 任务
FreeROTS实时操作系统一共运行两个用户任务,一个是软件定时器任务(task1),另一个是舵机控制任务(task2)。task1周期性地产生定时器溢出信号从而执行回调函数,在回调函数中先采集雨滴传感器的信号,然后通过消息队列发送给task2。task2收到消息后判断处理,决定是否启动舵机以及控制舵机的转速。
2.4 控制系统的流程图
在整个系统运行的过程中,为了确保各个模块的功能能够准确和稳定地实现,主程序起到至关重要的作用。主程序首先进行单片机连接各个模块的驱动端口的定义,由定义常量、变量声明、函数声明、主函数、子函数等部分组成[7,8]。
系统主程序流程图如图12所示。当设备启动时,将进行初始化,然后依次创建消息列队、定时器任务、舵机控制任务,最后开始任务调度。雨滴传感器检测到为下雨天时,雨刮将执行清洁外窗操作。
在智能清洁外窗系统设计中,设置了一个舵机控制雨刮系统,其工作流程图如图13所示。而该系统正常运作的关键是雨滴采集和舵机控制,再通过编写算法,让舵机工作。最终能实现下雨天自动关窗且自动执行清洁外窗功能,同时可根据雨量大小来调节雨刮工作的频率。
3 结 论
本文详细介绍了清洁外窗系统的工作原理、机械结构的设计方法以及控制系统的设计,该系统采用FreeROTS实时操作系统,实现了软件定时器任务和舵机控制任务。通过搭建的窗户功能模型,验证了本设计简单且可行,具有一定的应用前景。
参考文献:
[1] 朱春佳.智能窗户清洁机器人控制系统设计 [D].杭州:浙江大学,2015.
[2] 张洋,刘军,严汗宇,等.原子教你玩STM32(库函数版) [M].第2版.北京:北京航空大学出版社,2015:529-537.
[3] 李东,柏军.大学计算机组成原理教程 [M].第2版.北京:电子工业出版社,2014:145-158.
[4] 廖惜春.高频电子线路 [M].北京:人民邮电出版社,2014:27-30.
[5] 刘军,张洋,严汗宇,等.精通STM32F4(寄存器版) [M].北京:北京航空航天大学出版社,2015:248-258.
[6] 王田苗.嵌入式系统设计与实例开发:基于ARM微处理器与μC/OS-II实时操作系统 [M].第2版.北京:清华大学出版社,2002:3-4.
[7] 周坚.单片机C语言轻松入门 [M].第2版.北京:北京航空大学出版社,2011:10-23.
[8] 李春葆.数据结构教程 [M].第4版.北京:清华大学出版社,2013:64-89.
作者简介:刘咏梅(1989-),女,汉族,讲师。研究方向:光电材料与器件;蓝剑威(1997-),男,汉族,本科。研究方向:自动控制。